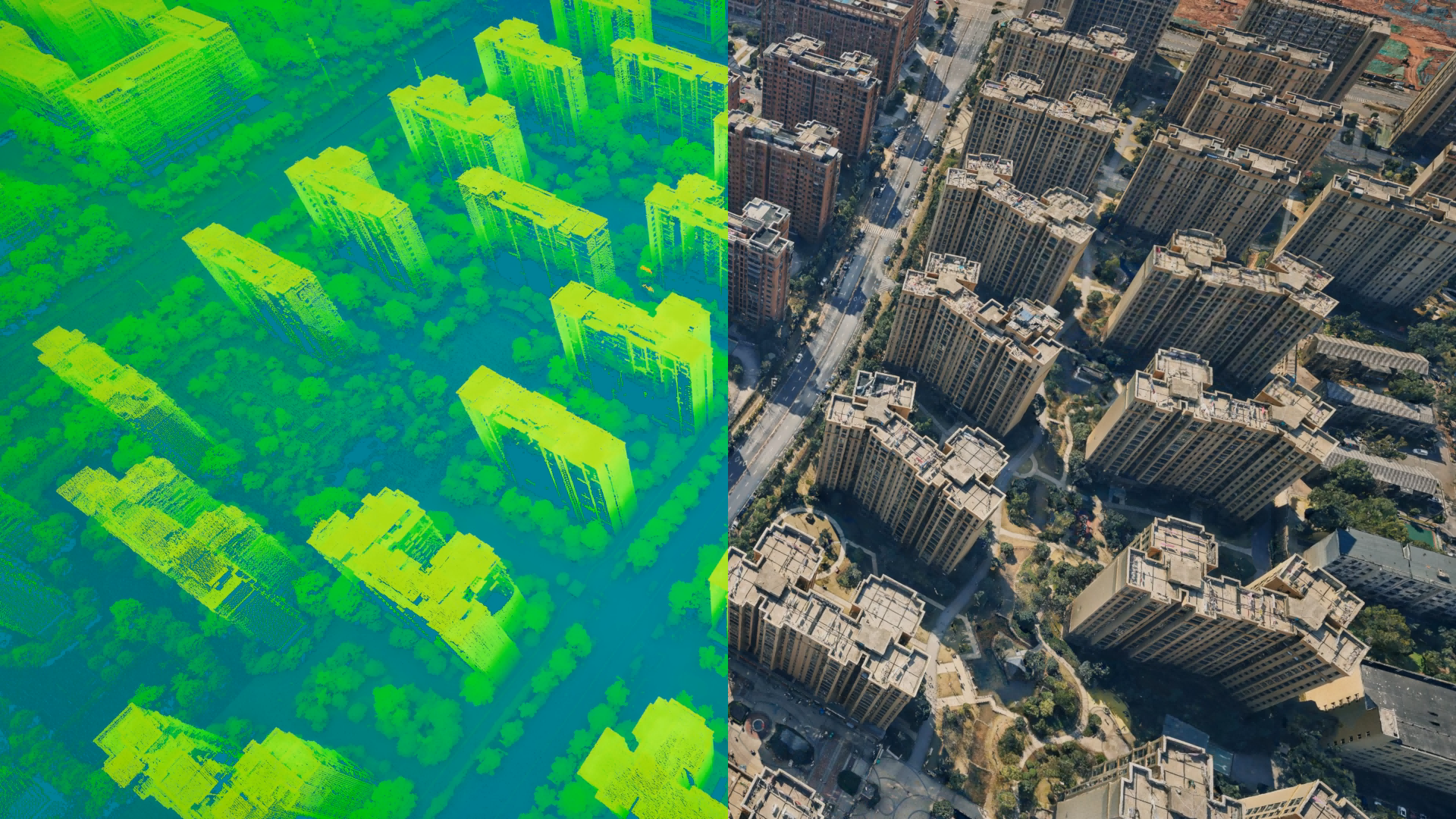
机载LiDAR技术是20世纪80年代中期逐渐发展起来的一项高新技术,与传统航空摄影测量技术相比,机载LiDAR技术不受日照、天气影响,可全天候主动快速获取精确的高分辨率数字地面模型及地物的三维坐标,具备采集速度快、高程精度高、成图周期短等特点。
该技术通过位置、距离、角度等观测数据直接获取对象表面的三维点云信息,具有数据获取速度快、空间与时间分辨率高、动态探测范围大、主动性强等特点,广泛应用于城市大比例尺测图、林业调查、电力巡线等各个领域。因此,利用机载LiDAR数据快速完成数字高程模型(DEM)的大规模生产,已成为最近几年测绘生产及其他领域的一个研究和应用热点。
本文结合机载LiDAR技术的工作原理和点云数据特点,着重分析利用机载激光点云数据提取DEM的关键技术,即激光点云滤波与分类、点云数据内插、DEM构建与评价,建立基于机载LiDAR数据的DEM生产技术流程,并将其应用于高精度地表模型制作项目中,构建成规则格网1:2000比例尺的高精度DEM模型。
一、机载LiDAR技术工作原理
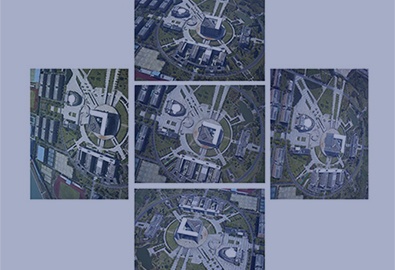
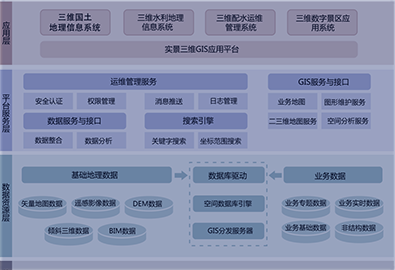
机载LiDAR技术是全三维测量模式,它以飞机为载体,集成激光扫描系统、GPS和惯性测量单元(inertialmeasurementunit,IMU) 3个基本的数据采集工具及控制单元系统等其他设备于一体,从而获取地面的三维空间信息。其中,激光扫描系统以脉冲激光测距作为主要技术手段,以激光束扫描的工作方式测量从传感器到地物对象的激光照射点间的距离,即通过测量地面采样点激光回波脉冲相对于发射激光主波之间的时间延迟得到传感器到地面采样点之间的距离,同时还可以获得反射率、激光脉冲回波次数等信息;GPS接收机用于确定激光发射点的空间位置;IMU测量激光发射瞬间激光的空间姿态参数。机载LiDAR系统通过激光扫描系统获得激光点的距离信息,结合由惯性导航系统输出的激光发射点空间位置和姿态信息,可以解算出激光脚点在当地水平坐标系下的三维坐标,即一系列离散的、空间分布不规则的三维点云数据,具体流程如图所示。

机载激光点云数据处理技术流程图
二、机载LiDAR关键技术研究
1. 数据预处理
机载激光点云数据预处理主要是将航飞过程中获得的差分GPS数据和IMU数据进行联合解算获得定位定姿数据,然后利用联合定位定向数据、原始点云信息及系统所提供的各类参数进行解算,获得每一个激光点的在WGS-84坐标系下的三维坐标。根据项目成果需要,将LiDAR点云数据由WGS-84坐标系转换到地方坐标系或CGCS2000坐标系,所得结果为随机分布的带有高程、位置和强度信息的激光点云。此外,由于机载LiDAR系统获得的海量点云数据中包含了大量的粗差和系统误差,数据预处理中应进行粗差检测和剔除处理,即剔除极高点和极低点。
2. 激光点云滤波与分类
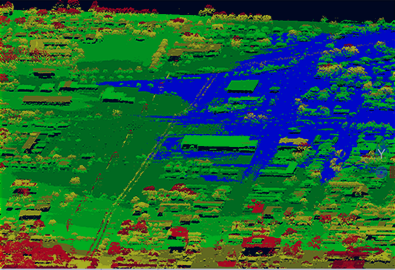
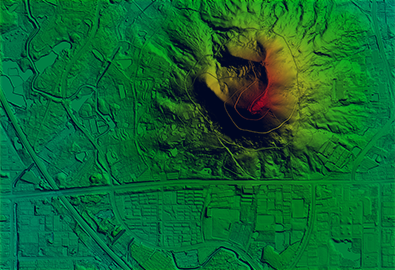
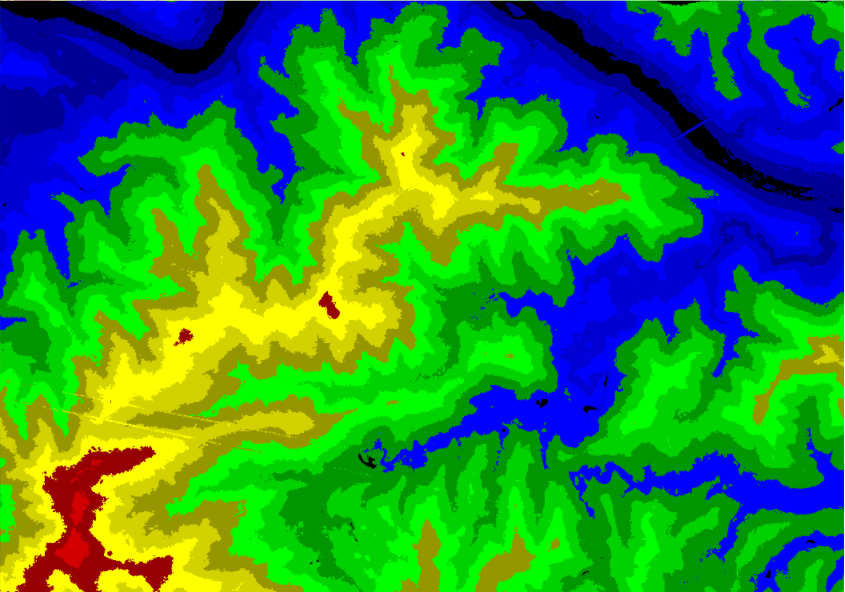
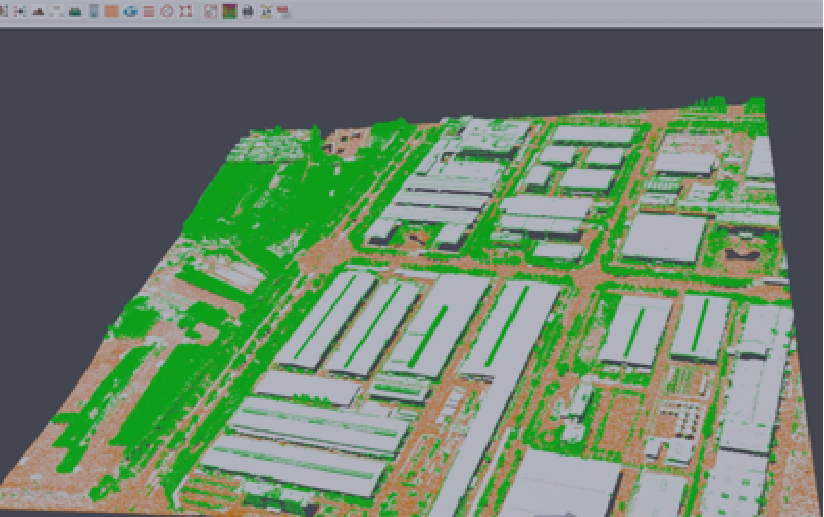
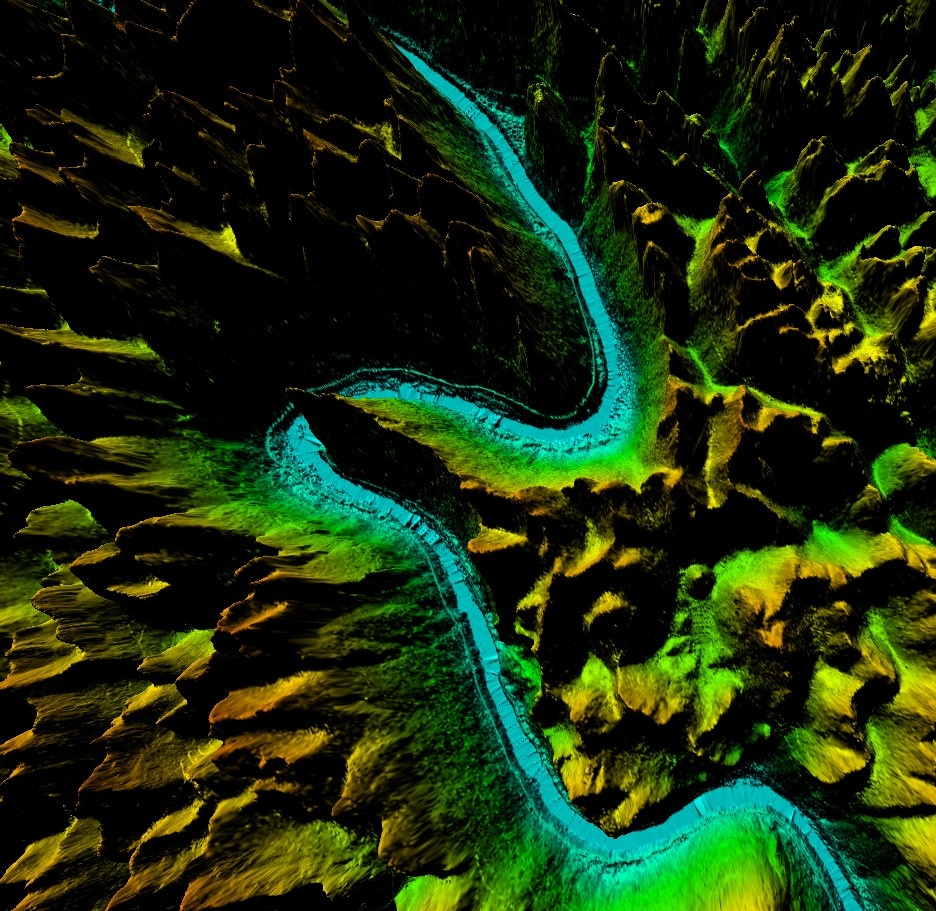
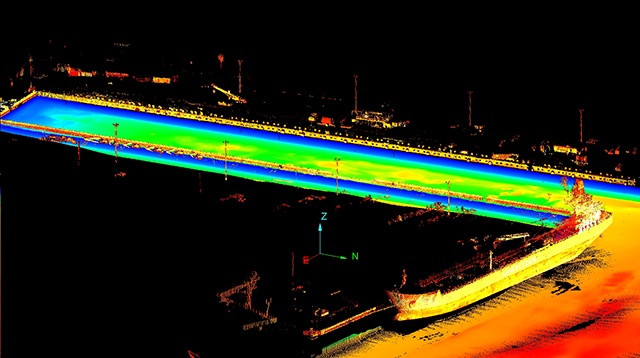
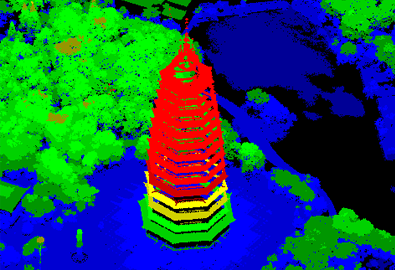
机载LiDAR系统获取的原始点云数据是离散的孤立点,其主要的数据值为回波信号点的三维空间坐标及一些附带的属性信息(如强度、反射波次数等),点与点之间不存在任何拓扑关系。机载激光点云滤波技术是指从离散的点云数据中区分出地面点和非地面点的过程,其基本原理是基于邻近激光脚点间的高程突变(一般不是由地形的突然起伏变化所造成的),进行滤波计算时需要设置一定的阈值,判断激光脚点是否位于地形表面。利用机载激光点云数据制作DEM时滤波与分类具体流程可概况为按照回波次数分类—地面点分类—水系分类。

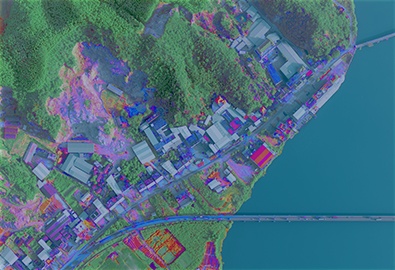
机载激光点云数据图
(1) 按照激光回波次数分类。由于机载激光具有穿透性,导致在扫描过程中不同的地物有着不同的回波次数和强度信息,当激光脉冲照射到建筑物顶部或裸露的地表时只产生一次回波,而激光脉冲照射到植被时,由于激光信号可以穿透植被从而形成多次回波。因此,可对多次回波中的最后一次回波数据和仅一次回波的激光数据进行提取,从而滤除大量非地面点。
(2) 地面点自动分类。通过反复建立地表三角网模型的方式分离出地表点,并反复加入新的激光点扩展模型,确保每个加入的激光点使得模型更加贴近地表,从而最终得到一个近似的地表面。具体分类方法为:首先设定测区内的最大房屋尺寸,选择少许局部激光低点,确保该局部激光低点间的距离不小于最大房屋尺寸;其次基于上述低点构建初始三角网,假定该三角网的最高顶点贴合地面,并通过不断迭代将该初始三角网上方的点加入以构建新模型,从而得到一个近似的地表面。
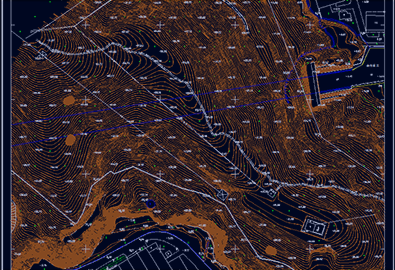
(3) 人机交互分类。自动分类后的数据可以获得概略地形地貌,但存在一些错分或误分激光点云数据,同时一些小的地形不连续部分也会被平滑或去掉,因此需要通过人机交互方式分类。人机交互分类方法是指参照高分辨率影像,通过人工判断的方式对自动分类的结果进行修正或对特定地物类别进行分类。可通过建立不规则三角网模型(TIN格网),对区域内的整体点云进行分类,剔除坑点或突出点,细部可再根据横截面修正。由于建筑物规模和形态变化较为复杂,需以人机交互分类为主。水系一般无激光回波,但也存在浑浊水体稀疏回波现象,需要结合影像和周围地形进行判断。
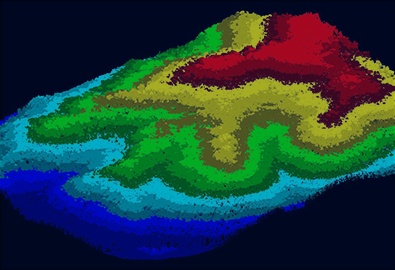
3. DEM构建与评价
DEM主要基于TIN格网构建,即对于滤波分类的地面点云数据,利用ArcGIS软件创建TIN,构建约束三角网模型,并进一步生成规则格网Grid格式的DEM数据。利用 TerraSolid 软件对激光点云数据进行预处理、滤波与分类、点云数据内插,最后得到DEM。
综上所述,主要介绍了利用LiDAR激光点云数据制作高精度DEM的技术流程和方法。
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:
精彩回顾,飞燕遥感亮相地信大会技术与应用展览并发表演讲
官宣!飞燕航空再次引进RIEGL VQ-1560i机载激光雷达测量系统

机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...

飞燕遥感承接了近万平方公里的点云及影像数据采集的新能源测图项目并顺利验收。项目通...

近日,湖北省经信厅发布《2022年度湖北省创新产品应用示范推荐目录》(以下简称《目录...
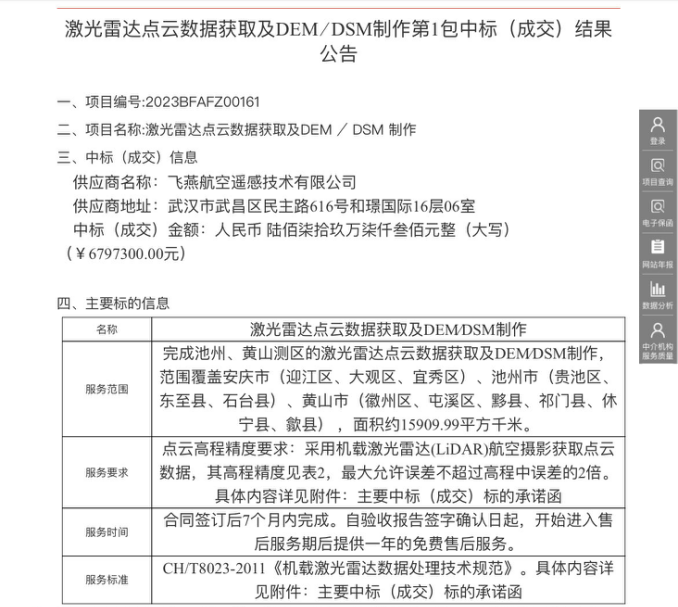
近日,飞燕遥感喜中2023年安徽省机载激光雷达点云项目,中标金额6,797,300元。 此次...
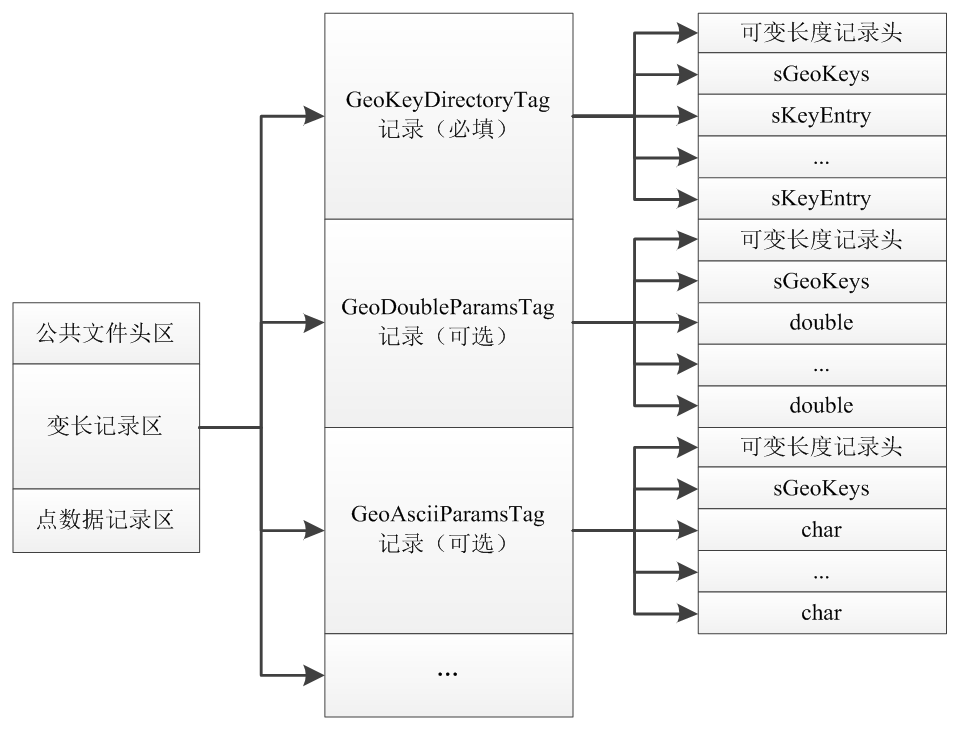
LAS 1.2是目前机载LiDAR中用的最多的点云文件格式之一。一个符合LAS 1.2 标准的LIDAR ...
机载LiDAR技术是激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English