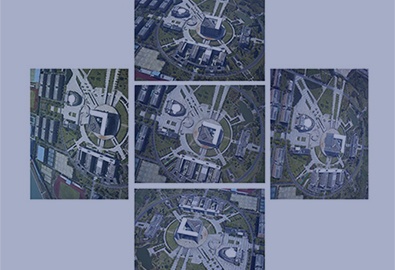
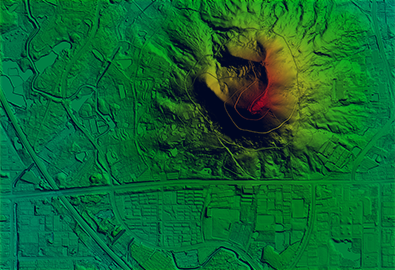
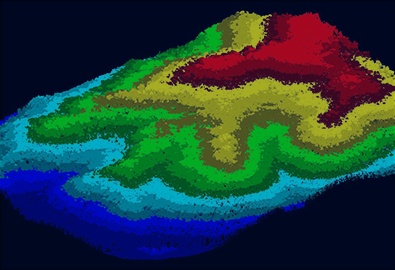
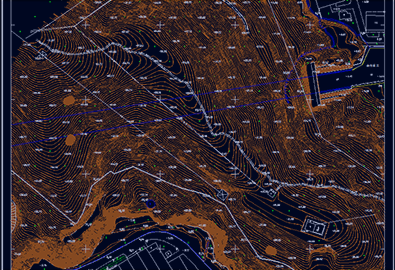
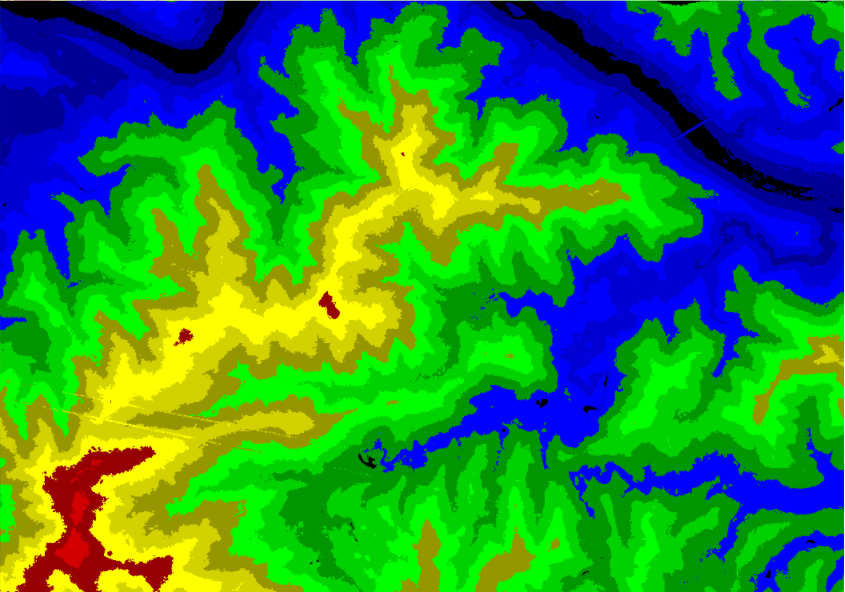
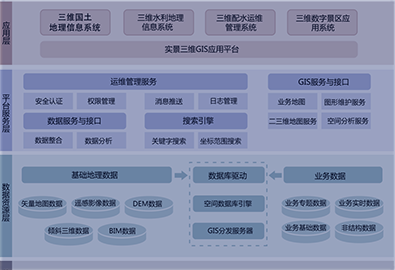
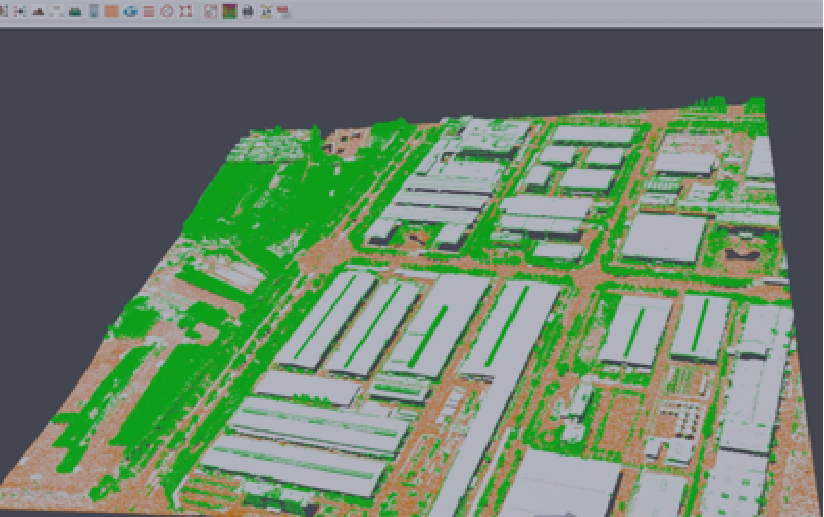
P3C是飞燕航空遥感技术有限公司开发的具备自主知识产权的机载激光雷达点云数据处理软件,是Point Cloud Cluster & Classification的缩写,具备海量点云读写、显示、滤波、聚类、分类、矢量导出、批处理等功能(见图 1)。P3C的主要优点在于:
1) 可以自动化、高准确度地将误分为地面点的大面积建筑物纠正为非地面点,提高地面点提取的精确度;
2) 可以高效、准确、完全地提取建筑物点,能将大小建筑物屋顶的附属设施和外墙上的点提取为建筑物点。树木点被误分为建筑物点的比例极低,一般低于万分之一;
3) 可以自动计算由水体、建筑物等造成的断裂线及面积,具备拓扑信息,可以跨块追踪断裂线,极大减少人手工勾绘断裂线的工作量;
4) 可以自动计算屋顶、树林等的矢量边界及面积;
5) 具备灵活的批处理功能。可以将众多小处理功能自由组合,形成灵活的处理流程,在读取DGN格式的分块文件后对指定小块进行批量处理和导出;
6) 具备检测细长地物的能力,可以提取火车、篱笆等细长地物;
7) 可以在陡峭山头补充提取地面点,提高DEM的准确度;
8) 可以基于点云或DEM对点云进行高程归一化,方便树高、建筑物高等的表达;
9) 具备抽稀读写点云的功能。

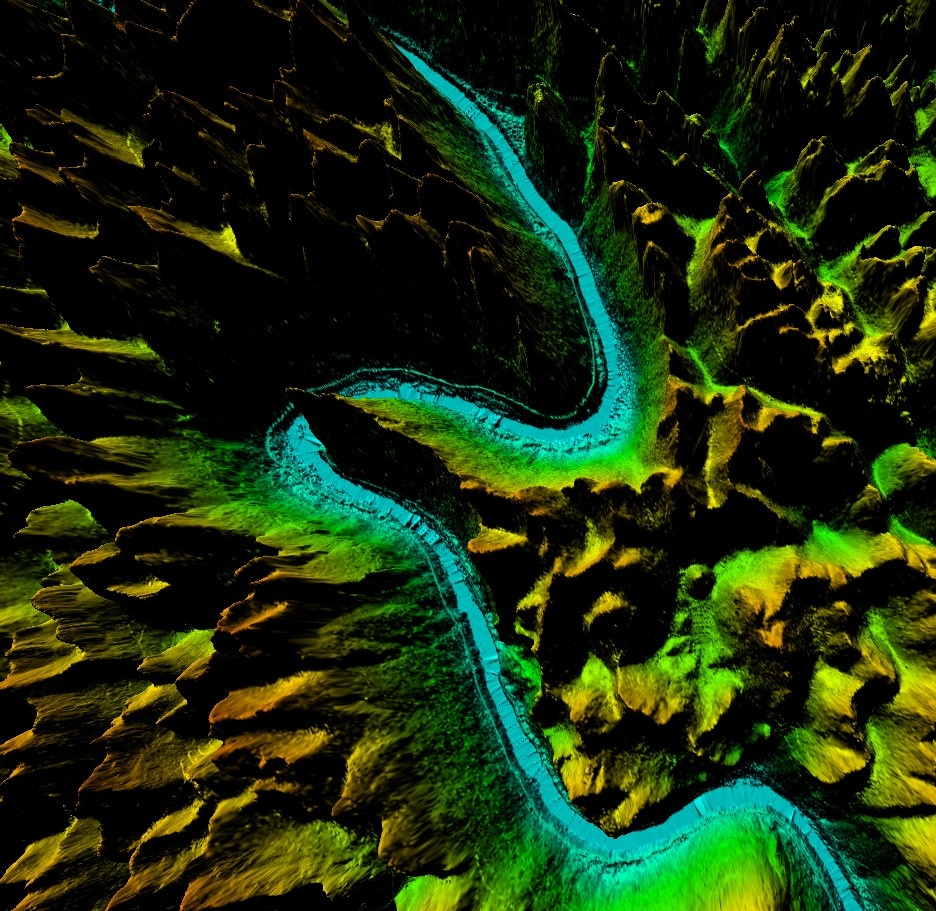
图 1 P3C功能
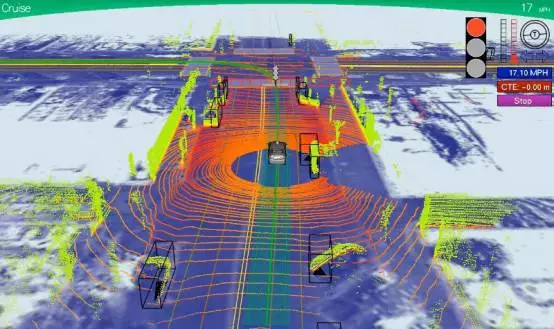
实景三维之激光点云采集技术,机载激光雷达技术是激光测距技术、计算机技术、高精度动态载体姿态测量技术(INS)和高精度动态GPS差分定位技术迅速发展的集中体现。激光测距技术在传统的常规测量中就扮演着非常重要的角色,从最初的有反射棱镜的测距仪系统发展到如今无合作目标的激光测距系统;GPS定位技术的出现彻底解...
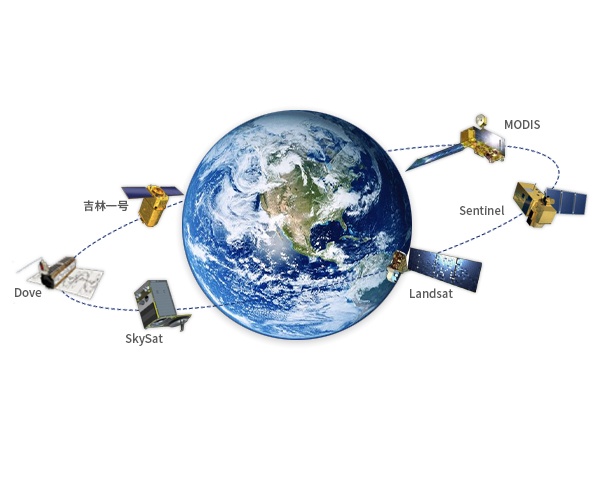
通过激光探测与测量(LiDAR)获取的数据就是激光点云数据。LiDAR 获取数据的方式主要分为三大类:星载、机载和地面。星载 LiDAR 采用卫星平台,运行轨道高、观测视野广,基本可以测量到地球的每一个角落。机载主要借助无人机(UAV/UAS)进行大规模的点云数据采集。地面分为三种:地上三维激光扫描、车载 MMS、手持...

激光雷达具备着以下几个特点:1、全天候工作,主动获取数据;2、隐蔽性好,抗有源干扰能力强,且获取数据范围广;3、激光穿透能力强;4、外业工作量小;5、点云精度高,空间坐标信息准确。 所以,激光雷达(LiDAR)获取的点云数据,往往也适用资源勘探、城市规划、农业开发、水利工程、环境监测、矿山测量、隧道...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English