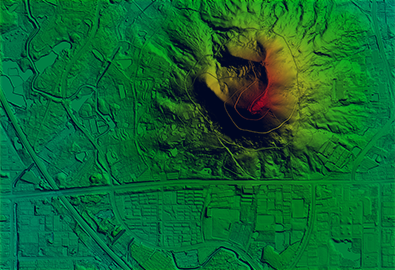
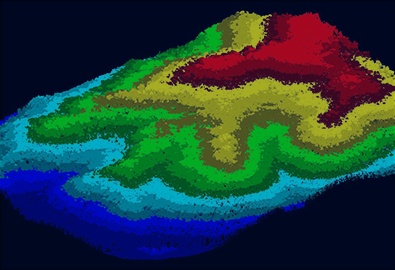
激光雷达,是一种主动式、快速、精确获取空间三维数据的测量技术。机载激光扫描技术是激光测距技、计算机技术、高精度动态载体姿态测量技术(INS)和高精度动态GPS差分定位技术迅速发展的集中表现。激光脚点在三维空间的分布形态呈现随机离散的数据点点云。这些点有的位于真是地形表面,有的位于人工建筑物或自然植被上。从激光脚点数据点云中提取数字地面高程模型需要将其中的地物数据点去掉,也就是激光雷达数据的滤波。
1、研究现状
经过数十年的发展,国外机载激光雷达硬件技术已经比较成熟,然而机载激光雷达数据处理算法仍然处于研究的发展阶段,还有一系列问题没有很好的解决。现有Lidar数据处理过滤算法在地物复杂程度低的情况下滤波效果较好,但自然界复杂的地形特征、地物覆盖类型(密度高低不一的植被,自然地貌,人造地貌等),再加上机载激光点云的密度高低不一等等原因都有可能造成DTM生成算法在某种特定的区域失败。所以这些算法在地理环境综合、地形多变的情况下滤波效果精度不容乐观,甚至大部分地物都滤除不掉。
2、LIDAR数据预处理
野外飞行后可得到两组数据,有POS数据和对应瞬时扫描角的激光距离测量值。对数据进行质量分析,若POS数据的位置优于1dm,定向精度优于0.02r可由对应于不丸角的激光测距值和POS数据这三组数据计算激光脚点在WGS-84坐标系中较为精确的三维坐标。坐标转换的顺序是从瞬时激光束坐标系→激光扫描参考坐标系→载体坐标系→惯性平台参考坐标系→当地水平参考坐标系→当地垂直参考坐标系→WGS-84坐标系。再将Lidar数据由WGS-84坐标变化到所采用的局部坐标系统,所得结果为随机分布的带有高程、位置和强度信息的激光脚点点云。

3、LIDAR数据滤波
3.1滤波原理
滤波的基本原理是基于临近激光脚点间的高程突变(局部不连续)一般不是由地形的陡然起伏所造成,更为可能的是较高点位于某些地物。Lidar滤波时,需建立一个规则用来区分地面点和非地面点。所有滤波算法都需要一个或者多个假设条件。不同算法的假设条件不同,理论模型也有很大的差异,在不同的地质地貌下表现出的数据过滤效果也各不相同。目前所用到的假设条件主要有:非地面点均高于地面点,绝大多数滤波算法都基于此前提。地面坡度变化不会太大,自然地形坡度变化总在一定限度之内,不属于地形的地物坡度会超过这个限度。
但滤波的假设条件存在一些问题。由于粗差、多路径效应等,造成最低点并非理想地面点数据,当按照假设条件把这些点作为地面点时将引起很大误差甚至错误。所以在对Lidar数据滤波前,先要剔除粗差。对于条件二在平坦地区假设有效,对坡度较大的山区,并不总是满足。
3.2滤波方法
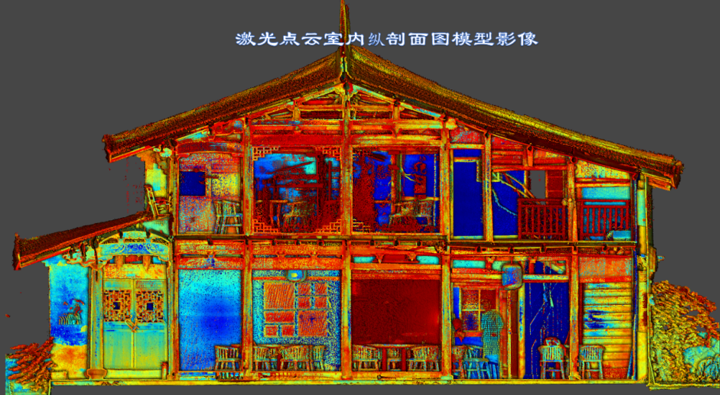
随着Lidar系统的不断发展,不仅可以提供激光脚点的三维坐标,还可以提供每个激光脚点的强度信息,由此可获得强度影像,从而可融合强度影像进行滤波分类。很多学者提出了各种滤波方法,根据滤波观念的不同,大致可以分为以下几类,基于形态学的滤波算法、基于坡度变化的滤波算法、基于内插的滤波算法、基于曲面约束的滤波算法等方法。
3.2.1基于形态学的滤波算法
基于形态学的滤波算法借鉴于栅格图像处理,基于区块操作。形态学法先把Lidar点云重新组织成行列有序的规则格网形式这样便于使用很多既有的算法,如开闭运算、腐蚀运算、膨胀运算等,并具有直观、效率高、操作容易等优点,缺点是内插会带来精度的损失,容易受到滤波窗口大小的影响,并且不能很好的处理地形变化剧烈的区域。
3.2.2基于坡度变化的滤波算法
基于坡度变化的滤波算法基本思想是地形急剧变化产生临近两点间高程差异很大的可能性很小,其中一点属于地物点的可能性更大。算法根据地形坡度变化确定最优滤波函数。为了保留倾斜地形信息,适当调整滤波窗口的大小,并增加筛选阈值的取值以保证属于地面点的激光点不被过滤掉,且滤波参数的最优值随着地形的变化而变化。当点显著高于其邻域其余点时被认为是地物点,可见遇到坡度变化较大的地形时,就会影响这类方法的精度。
3.2.3基于内插的滤波算法
基于内插的滤波算法的基本思想是先构建一个较粗的起始DEM,再逐步从备选点中筛选并内插加密DEM达到分类的目的。基于内插的滤波方法是一种逐步迭代逐层加密的方式进行数据分类,因此,计算过程存在误差累积,受到初始DEM影响较大,且每一层的迭代判断结果受到上一层的影响,如果上一层次的处理出现了错误,这种错误会导致下一层次的数据点类型判断出现错误。因此,初始DEM的选择非常重要。在使用此类方法前,一般要剔除数据中的粗差。
3.2.4基于曲面约束的滤波算法
地面可以看作是一个连续且平缓变化的表面,所以,可用带限制条件的参数曲面约束分类,如:Snake样条曲面、正交多项式等。约束曲面计算过程中的曲面拟合具有抑制粗差的功能,通常不需要先剔除粗差。此方法过于强调地形的平缓变化,忽略了地形的复杂性,因此,在地形变化剧烈的山区会存在一定问题。由于曲面计算和分析计算量较大,此类算法的运行效率相对比较低。
3.2.5滤波展望
与比较成熟的硬件相比,机载激光雷达数据后处理软件的发展较为滞后。一些算法和模型仍处于研究阶段。目前市场上的各种数据处理软件能实现不同的功能,各有其优点,数据处理时需选取适合的软件,有时需要多种软件配合。
目前任何一种都无法完全保证过滤掉所有的地物,可在以下方面作进一步研究和扩展:利用强度和回波信息;自适应阈值;数据流的引用;结合计算机技术的新理论等。
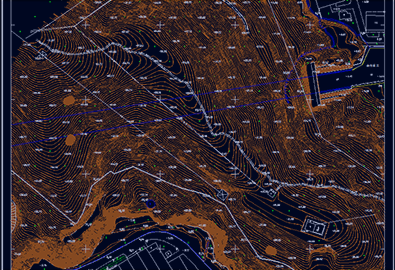
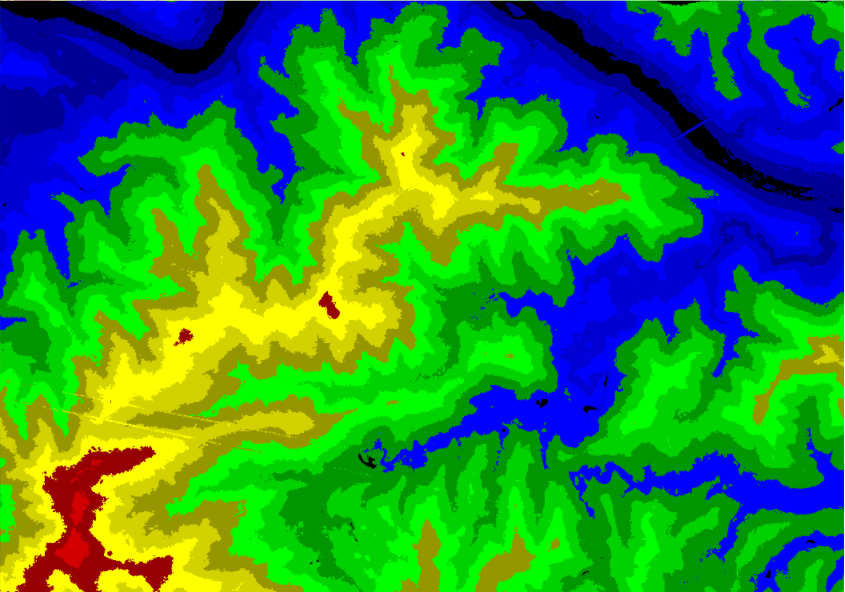
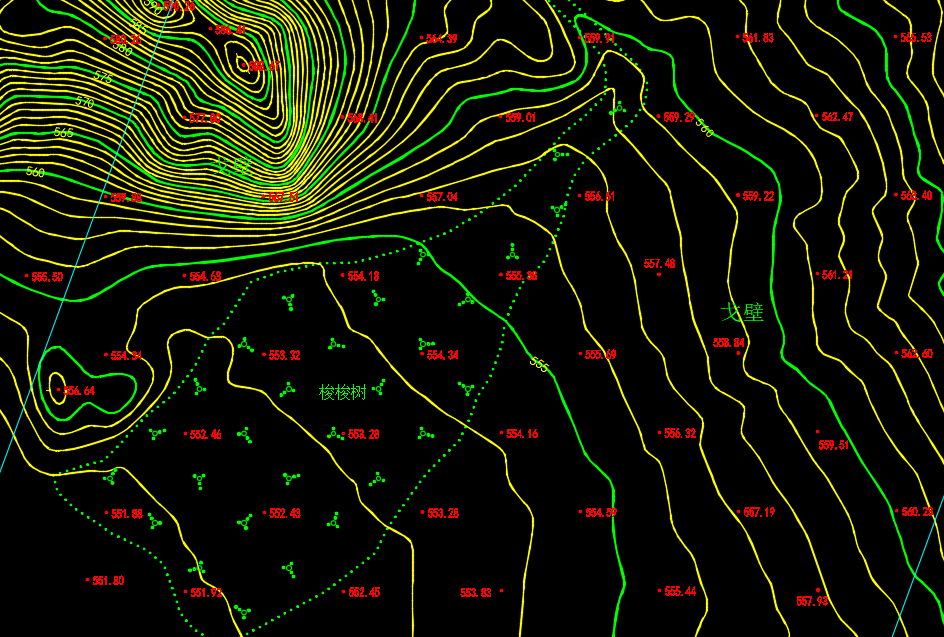
4、DEM的构建
很多软件都可以完成DEM的生成,但由于滤波不完全,会影像DEM的精度这里可以采用鲁棒回归法、鲁棒插值、线性预测法。LIDAR点云的分布是离散的,故数据误差也不会服从正态分布,所以最小二乘法不是最佳的拟合方法。这时就要采用最小中值二乘方法。线性预测是一种统计内插方法,既可以基于规则格网也可以基于不规则三角网实现。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。

近日,由飞燕航空遥感技术有限公司(以下简称“飞燕遥感”)承接的上饶市平地与丘陵地区2米格网数据(DEM、DSM)制作项目顺利通过专家组验收。项目采用飞燕遥感自持机载激光雷达设备,...

项目成果为江西智慧城市建设、空间规划等领域提供了坚实的数据支撑与决策依据,满足自...
飞燕遥感外业团队使用越野车并雇佣有经验的当地人民带路进出沙漠,在确保每位外业人员...

LIDAR全名LightDetectionAndRanging,是一种激光扫描测量技术,它利用GPS和IMU(惯性测量...
目前地形数据获取主要有三种方式:现场实测、三维正射影像转数字高程模型DEM、激光三维...
数字高程模型,简称DEM(DigitalElevationModel),是表达地面高程起伏形态的实体地面模型...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English