近年来,网络通讯技术、计算机技术、激光测距技术及GPS技术等技术的不断发展成熟,机载激光雷达技术正蓬勃发展,欧美等一些发达国家逐步研制出很多种机载激光雷达测量系统,它的应用已超国遥感所覆盖的范围和传统测量,成为一种特有的数据获取方式。
一、机载激光雷达
机载激光雷达是导航系统、全球定位系统以及激光惯性3种技术集于一身的空间测量系统。此系统是将惯性导航系统、激光扫描仪、GPS接受机、数码相机以及控制元件等搭载在载体的飞机之上。它主动朝地面发射激光脉冲,接受反射脉冲并对所使用的时间及时记录,计算出激光扫描仪距离地面的距离,POS系统所测得的姿态信息和位置能够计算出地面点的三维坐标。
比较传统的摄影测量,激光雷达可以进行直接获取目标的三维信息,数据到有用信息的过程得以缩短。激光雷达的明显特征是激光能够穿透植被的叶面抵达地表,同时获取植被和地面的信息,探测细小目标也可以被探测到,从而获取的数据信息丰富,目前来说是其他技术所不及的。
二、数据的采集
1、数据采集前准备工作
在数据采集之前需要进行多方面详细周密的准备工作,其中主要包括选择检校场、设计航线、申请空域和布设地面基准站。
2、申请空域
在任何一个航摄任务执行前要按照规定向有关部门提出空域取得航飞权的申请。在航飞权期间挑选最好的天气飞行,这样可以使拍摄影像的质量得到保证。
3、航线设计
在对航飞路线设计时,要遵循经济、周密、安全和高效的原则,选则专门的航飞设计软件来对飞行路线进行设计。通常在航线设计时,要参考小比例尺的二维平面地形图,综合的进行测区的地貌、地形、机载激光雷达设备的参数(扫描角、相机镜头焦距、扫描频率等)天气条件(雾、云、烟尘、降雨等等)航带重叠度、航带宽度和用户要求的点云密度考虑,设计出符合项目精度要求的航线。设计出良好的航线,能够在精度要求被满足的前提下降低成本,节省飞行时间。
3、布设地面基准站
在测区内设置一定数量的GPS基准站,对动态GPS定位,通常来说基站间距为30~5km。将基站构建成SmarBase网解算GPS数据,大气误差能够减小同时也可减小电离层延迟误差、卫星钟差及轨道差、对流层延迟误差等等一系列误差。假如要用这种方法解算GPS数据,则布设的GPS基准站就需要包围整个测区,间距设置在70km为宜。在测区中也要布设1~2个基准站,用于在进行数据处理之后快速的对所测点云与已知点的绝对误差进行检测。
检校场的选择:在数据采集的前后,都要进行对设备的检校,通常通过处理检校场数据、采集以及安装轴间精密的偏心角和计算出各仪器之间精密的偏心分量,继而对整个测区数据纠正系统误差,使精度提高。
IMU的3个角即俯视角、侧滚角、航片角的检校,地形上要求有一定的坡度,但这个坡度不能太大,同时地形的范围要大些,以保证航线有足够长度。通常选择有山坡、平地、房屋的地区作为检校场。在进行飞检校场时,通常飞“田”字形或者“井”字形。
4、采集数据
在飞机起飞前三十分钟,将地面基准站上GPS接收机打开,在飞行到测区之前,将POS系统打开,并静止一段时间,继而按着“8”字形飞,在飞完后进行 五分钟的直飞,从而保证POS系统能够处于最佳的工作状态,然后开始数据的采集。在进行数据采集时,飞机可以按照设计航线进行自动飞行,相机和扫描仪、POS系统根据设置的参数来采集数据。采集完数据之后再依次直飞五分钟、倒“8”字形飞、几分钟静止,并关掉POS系统,地面GPS接收机在飞机关掉POS系统之后的三十分钟再关。
假如机场离测区比较远,在采集测区数据前后就不用飞倒“8”的字形。总而言之,在数据采集之前,POS系统要保证处于良好工作状态。
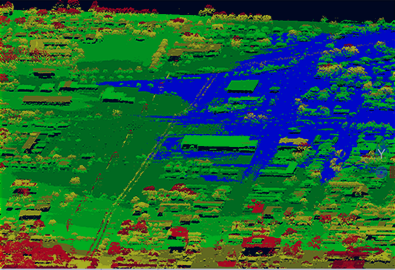
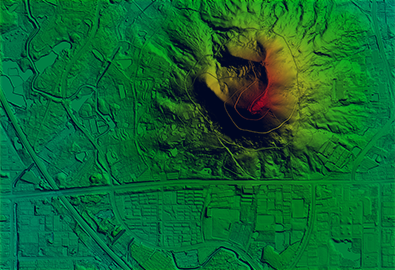
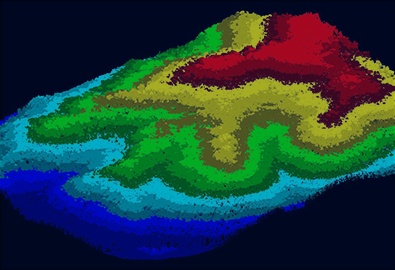
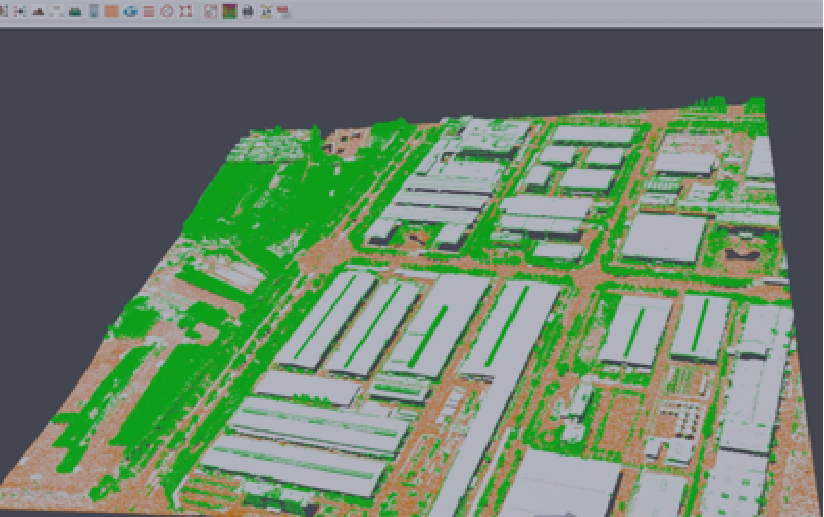
三、Lidar数据的分类处理
Lidar数据包含许多类型,比如植被、房屋建筑、地表等等,假如要对DTM(数字地形模型)提取,就必须要分离开地表点和非地表类型点,也就是说要对其进行数据分类,目前位置Lidar数据点滤波的力法很大一部分都是基于三维激光数据脚点中的高程突变信息来进行的,概括来说主要有基于地形坡度滤波,迭代线性最小二乘内插法,移动窗口法和移动曲面拟合法等。
Lidar数据首先通常剔除噪声点,包括折射等一些会造成的高程异常点,然后采用专业软件进行适合的参数设置,TerraScan软件是处理地面激光雷达数据或者机载的通用软件包,是根据窗口移动法来分类提取地面点。
坐标转换。利用POS的动态定位来计算出激光点坐标属WGS84坐标体系,而大多测区采用地方坐标系,所以要通过坐标转换来获取最终的成果,坐标转换包含两个方面:正常高转换与平面坐标体系的转换。平面坐标体系转换通常情况通过联测地方坐标,用七参数法转换得到,正常高转换是则是根据测区的高程控制点拟合的,是大地水准面计算而得到的。

四、机载激光雷达技术的优势
与传统航测技术相比,机载激光雷达技术有很大的综合经济优势和技术优势。
1、成果的整体精度更高
(1)三维激光点云数据是由激光直接进行测量而得到的,传统的航测本质上是根据有限的几个像控点依据航测理论拟合测量。
(2)三维激光雷达系统采集的原始点的密度要高于传统的航测,每平方米平均可达到一个或者是十几个原始的数据点,传统航测立体像对与模拟技术采集所不能相比的。
(3)高程测量精度要比其它测绘方法高,尤其是在对传统测量手段里存在较大困难的树木覆盖的地区,激光有着比较强的穿透能力,可以获得到更高精度的地形表面的数据。
2、生产效率高、工期短
(1)航飞的高度比较低,因为是主动发射激光脉冲测量的,在航飞的过程中受到天气的影响比传统航测影响要小很多,适合飞行的天气比较多。
(2)机载Lidar测量技术仅仅只需要少量的人工进行野外测量工作,自动化、智能化的生产水平较高。
(3)综合利用三维激光点云数据和二维航空影像数据,在内业就能够清晰判别很大部分的地物,使传统航测的外业调绘工作量大大减少。
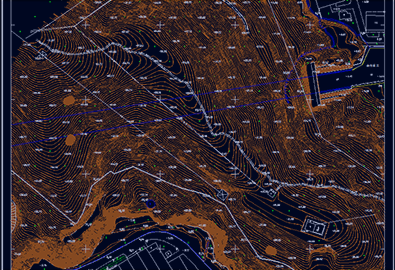
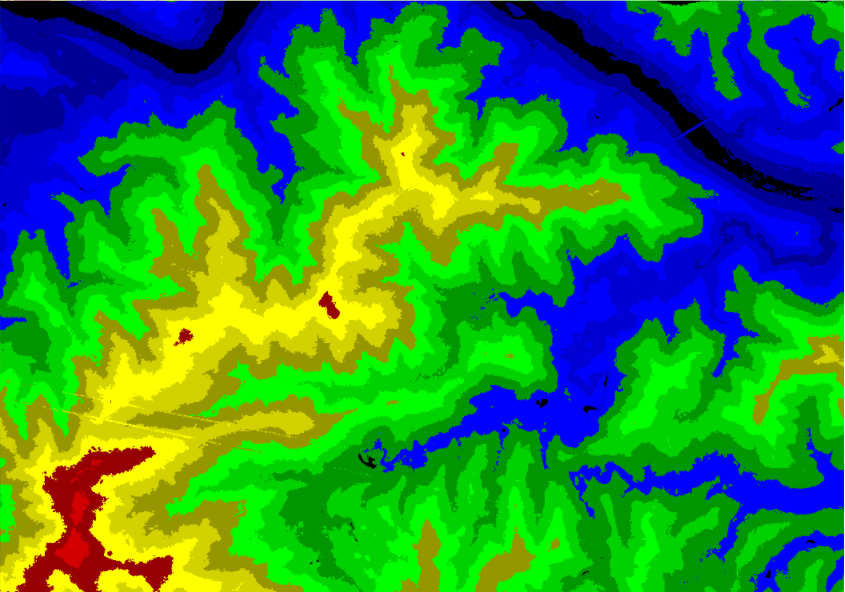
(4)根据三维激光点云数据能直接并获得DSM/DEM等成果。
3、成果质量更加有保障
三维激光雷达系统是同时采集数码影像、激光点云等许多源原始数据,在这些数据间能够彼此互相验证,而传统的航测只是采集单影像类的原始数据。
结语:
机载激光雷达系统在以下几方面的主要应用:
1、测制带状的地形图
包括测绘道路测量、铁路线路、道路设计和规划、交通运输、海岸侵蚀监测、海岸地带管理、输电线路和管理、河道和水资源等等。
2、环境检测和灾害调查
主要适用于自然灾害的灾后响应与评估。机载激光雷达测量技术能及时、快速并准确地直接服务自然灾害评估、管理和监测上。在我国去年5.12地震中失事直升机的搜索范围的圈定,利用的就是机载激光雷达测量技术通过ADS40航空数码相机相结合,向难度较高的搜寻工作提供了高精度的、可靠的地形数据。
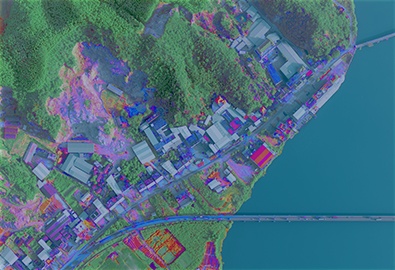
3、测绘海岸地区
包括浅海岸侵蚀的动态、海岸带测绘、海水深测量的监测。机载激光雷达测量技术在这个领域的应用相比较于其他测绘技术是有非常大的优势。
4、林业项目
按照机载激光雷达系统测量出的数据,对森林树木的覆盖面积和覆盖率进行分析,对树木的疏密程度进行了解,年长树木覆盖的面积与年幼树木覆盖的面积。
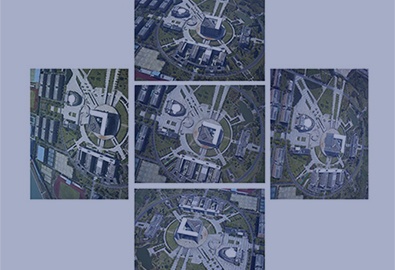
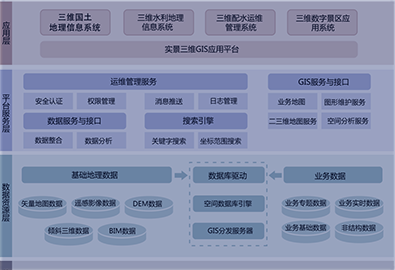
5、城市三维建模
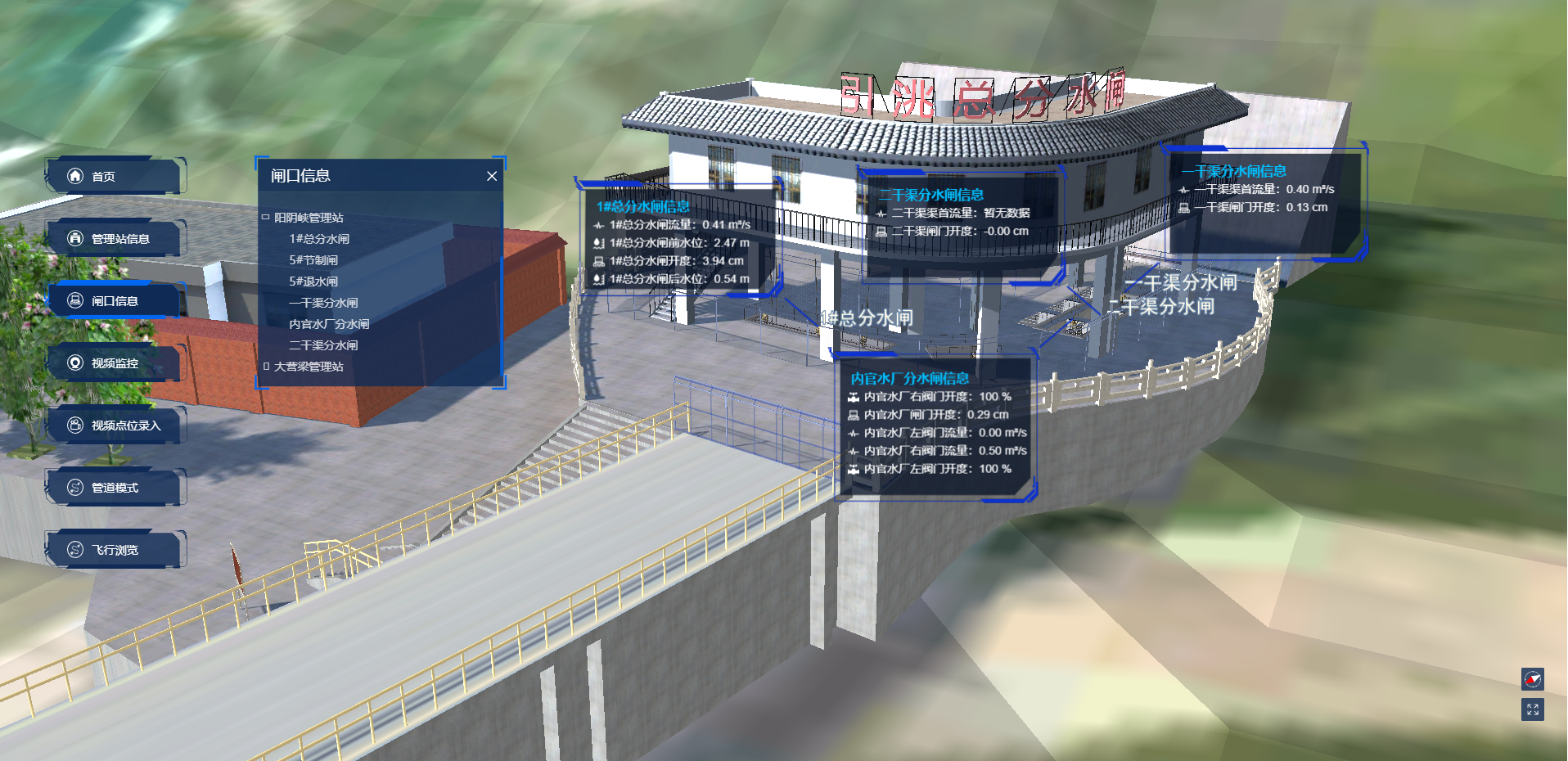
城市是GIS研究与应用领域的一个非常重要方面,3d城市模型是很多个应用领域急切需要的,已经被广泛的应用于建筑设计、城市规划、无线通讯等一系列领域,比如在城市规划中的建筑物地下管线、景观模拟的3d显示等问题。机载激光雷达测量能够提供精确与高密度观测值,应用前景广阔。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。

近日,由飞燕航空遥感技术有限公司(以下简称“飞燕遥感”)承接的上饶市平地与丘陵地区2米格网数据(DEM、DSM)制作项目顺利通过专家组验收。项目采用飞燕遥感自持机载激光雷达设备,...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数...
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布...

近日,飞燕遥感公司喜中2019年广西森林资源规划设计调查机载激光雷达数据获取及处理项目...

11月9日,中山市自然资源局组织召开“中山市2023-2024年基础地理信息数据更新项目”验...

实景三维、空间地理数据一直在身边,只是我们“日用而不觉”。到2025年,实景三维中国...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English