快速有效的提取图像的特征点并进行匹配,是航空摄影测量中的关键技术之一,也是计算机视觉中的一个重要问题,至今仍未得到彻底解决。为配合某道路交通改善工程。改善道路的安全标准。 某地政府计划全面重建某高速公路。 沿该公路所有受影响的天然斜坡,人造斜坡及挡土墙都将做详细勘察" 并进行有关的道路和斜坡改造工程,道路全长大约17km任务工期3个月。由于该条道路沿弯曲的海岸线而建,起伏不断,开挖大量山坡并建造不少暗渠和桥梁,使得斜坡的坡度大,如何安全、高效地完成此次测量任务成为该项目的一个难点。
1、航空摄影测量的发展
1.1、发展历程
20世纪50年代初,摄影测量工作者着手研究如何利用各种辅助数据以减少地面控制点,但限于当时的技术条件未能实际应用。到了70年代,美国GPS全球定位系统出现以后,人们开始采用载波相位差分GPS动态定位技术来确定航空摄影瞬间摄站的空间位置(即像片的3个外方位线元素),利用其进行空中三角测量(简称GPS辅助空中三角测量)可使摄影测量作业大量减少地面控制点、缩短航测成图周期、降低生产成本,引发了摄影测量一场小小的技术革命。然而,GPS辅助空中三角测量的优越性主要体现在大区域、中小比例尺、困难地区的航空摄影测量作业中,对于带状区域、城区大比例尺测图的应用并不具有明显的优势。进入90年代后,人们又开始研究采用GPS/INS组合系统(简称POS系统)来获取航空摄影时影像的空间方位(即利用GPS确定摄站的空间位置,利用IMU惯性测量装置获取影像的姿态角),以直接用于航测内业的像片定向,目的是取代摄影测量加密工序。
1.2、应用展望
由符合规范精度要求的摄影测量加密方法获取的影像外方位元素可以直接用于影像的定向以构建立体模型进行4D产品的生产,而由POS系统提供的影像外方位元素带有较大的误差,目前还难以直接用于摄影测量中提取三维空间信息。在当今这个许多工作可以由计算机自动完成的数字摄影测量时代,3种摄影测量模式并存,航摄影像的定向手段越来越多,并且逐步摆脱了地面控制点的束缚,这使得摄影测量作业变得愈来愈简单。总体看来,常规摄影测量加密是一种技术最为成熟、应用范围最广的影像定向参数获取方法,依然是摄影测量作业的主体;GPS辅助空中三角测量是一种易于操作且比较经济的方法,国内制定了相应的作业规范;POS直接传感器定向是航空摄影测量重要的发展方向之一,技术日臻成熟。就基础地理信息的获取而言,应充分发挥各自的优势,因地制宜,采用最佳的技术方案,以获取最大的经济效益。在交通便利、地势平坦地区的大比例尺地形测图中应以常规摄影测量方法为主;在困难地区、无图区或者人员不能通达地区,可采用无地面控制GPS航空摄影测量技术来获取基础地理信息和测制国家基本图;在正射影像图制作、小范围的4D产品更新等应用中可采用POS航空摄影测量方法。然而,在城市大比例尺测图、机载激光雷达、数字航空摄影等领域,POS系统具有广阔的应用前景。我们应尽快完善POS系统与其他传感器的集成技术,加大应用试验力度,充分发挥多传感器集成的航空遥感平台的作用,为经济、快速的地球空间信息获取提供技术支撑。
2、航空摄影测量作业要求
2.1、航空摄影
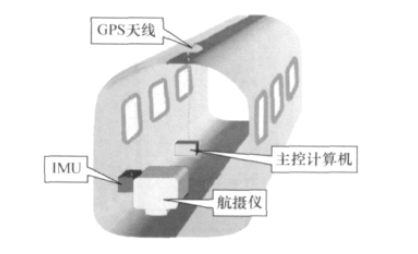
在现代航空摄影测量中,为了提高影像获取的质量,除对航摄仪加装飞行控制系统(如ASCOT、CCNS4、Track Air等系统)外,当采用GPS航空摄影测量时,还需要将动态GPS接收机与航摄仪固联;当采用DGPS/IMU航空摄影测量时,要在航摄仪上安装POS系统。
2.2、地面控制
在数字摄影测量工作站中,摄影测量加密均采用理论严密的光束法区域网平差,但对不同的摄影测量模式需要采用不同地面控制方案,以获得最佳的加密点坐标和像片外方位元素。
2.3、内业测绘
理论上讲,获得了影像精确外方位元素以后,可采取安置影像外方位元素的方法来建立可量测的立体模型(模型恢复),再采用影像匹配技术识别同名像点,以完成地形和地物的自动测绘。然而,现行的4D产品生产中,一般按照单片内定向→像对相对定向一单模型绝对定向→立体模型测绘的流程进行作业,仅仅是在DGPS/IMU航空摄影测量之直接对地目标定位方法中探讨如何利用POS系统获取的影像定向参数进行模型恢复的有关理论和方法。
3、航空摄影测量数据的获取
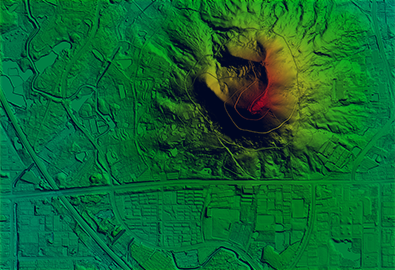
为了消除误差对最终数据的影响,航空摄影测量的像控点布设,采用平高全野外布点,每张像片布设6个定向点。由于该区域位于山坡,并且进入困难,水准测量的难度大,并且考虑到该地已经建立了高精度的卫星定位参考站,所以平面、高程全部采用测量完成。
3.1、像片控制测量
像片控制测量使用2台TOPCON LEGACY-H双频GPS,利用GPS参考站网,采用静态测量的方式进行,观测时间不低于30分钟。由于该地参考站之间的距离约为10~15km这样的分布保证用户在10km的半径之内至少能找到2个参考站供测量使用,这样的分布为测量定位提供了冗余基线,以作为独立检核和质量评定。根据GPS参考站网的情况,我们采用了7个参考站进行平差解算,解算最弱点的平面误差为6.53cm,最弱点的高程误差为5.34cm。
3.2、数据采集
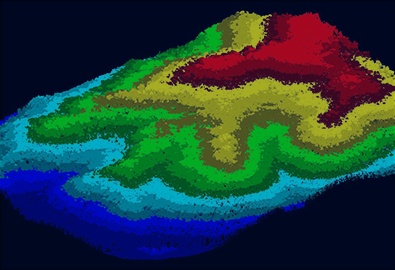
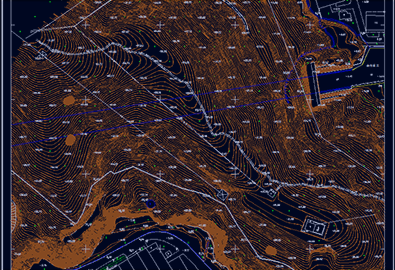
数据采集使用SSK全数字摄影测量工作站,采用相同的放大倍率进行数据的采集,采集使用单点切准的方式进行,以保证相对精度的稳定。对于影像不清或者遮盖的区域不进行采集,以避免精度的不一致对整个工程的影响。
3.3、地面测量
对于用地面测量的方法检验航空摄影测量的数据是否满足要求,我们设计了两步检查法。第一步:采用地面测量的方法测量明显地物点和道路要素中的斜坡底(顶 )同时尽量以较大的间距采集车道标志线的数据(实验区域定为50cm,采集一个点) 而后利用地面测量的数据与航空摄影测量的数据比对,首先检验航空摄影测量的精度,再利用检验的数据对航空摄影测量的数据进行改正。第二步: 利用夜间封路的时间对实验区段进行全面施测,测量要求完全按照工程的要求进行,而后与改正后的数据进行全面的比对与分析,检测经过改正后的航空摄影测量数据是否符合任务的要求。
整个地面测量工作使用LEICA TCR1102全站仪进行,实验区段根据航空摄影测量的情况, 在目标良好的区域和相对有遮盖的区域各选择了一段。第一步检测投入2个地面测量组,共采集了2000多个点,通过比对分析发现如下几个特征:
(1)明显地物点的平面平均较差约为0.15m,最大0.24m,高程平均较差约为0.12m,最大0.21m。
(2)道路行车线以及斜坡底线高程的较差约为0.11m,因为施测位置无法完全重合,距离有远近,所以未确定最大较差。
第二步检测投入2个地面测量组,利用夜间封路的时间对道路要素进行了全要素测量,斜坡要素,水系要素暂时未做测量,共进行了1个夜晚,完成了2段总共约1.3km的道路测量,共采集大约800个道路高程点,通过比对发现如下几个特征:
(1)对于道路行车线以及斜坡底线的高程平均较差,约为0.04m最大值为0.11m。
(2)中央隔离墩的平均较差约为0.06m最大值为0.19m。
(3)道路要素的总体平均误差约为0.05m。
通过以上分析,我们认为实验的效果比较理想。通过地面的检校,整个道路要素的高程精度大约提高了一倍,可以满足整个任务的要求,整个方法是可行的。
结束语
近年来航空摄影测量技术发展迅速,在科研与生活中应用广泛。其目标是对地面进行快速准确的量测与重建,通过寻找序列图像的同名像点,并依据褶火理论与公式计算空间点坐标许实现三维重建等任务,其中特征点提取与匹配已是关键技术之一。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。


ADS系列数字航摄仪应用的是推扫式摄影方式,应用POS系统进行数字影像获取。在航空摄影测量中应用ADS系列数字航摄仪,可以不经过扫描便可以直接为遥感图像处理系统及数字摄影测量提供全色...

金秋十月,华夏中原,中国测绘学会主办的中国测绘地理信息科学技术年会10月16日-17日在...

与传统的测绘技术相比,高空摄影技术可以对高空大比例尺的地形图进行较为准确的测绘。...

航空摄影测量技术中的空中三角测量,是在立体摄影测量实践中参照少部分野外控制点,并...

作为一种通过空间数据得到核心技术处理的综合技术,技术应用过程中需要从技术层面分析...
POS辅助空中三角测量的第一步是要采用载波相位动态GPS定位技术测定摄站的空间位置(简...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English