近年来,随着CCD技术的发展,数字航空摄影测量已成为航测中研究与应用的热点,其相对于传统胶片有明显的优越性,但航空摄影用数码相机取代胶片式相机成为数字航空摄影测量的关键设备。传统航测所采用的相机为量测相机,其光学畸变小,它可测定内方位元素,有框标装置,其机械结构稳固,摄影中心相对所拍摄影像的相对位置是经过严格检校的。但是使用胶片相机不仅价格昂贵,还要用昂贵的仪器对胶片影像数字化,而且胶片动态范围小,故航摄数据质量低,测图周期长,影响了整个行业进步。目前市场上缺乏测量专用的数码相机,航空摄影测量作业中使用的相机大多是使用高档的商业相机,没有检校出内方位元素,镜头畸变大,为了将数码相机应用于航空摄影测量,关键一步就是对相机进行严格的检校,求出相机的内方位元素及各项畸变参数,以便在数据后处理中消除影像的畸变差,使其达到航空摄影测量作业的要求。本文通过分析数码相机的误差来源,主流校验方法的比较,讨论测定数码相机校验的目的,利用对数码像机检校数学模型的建立、检校场的建立,验证相机内参数的可靠性,最后用实例应用证明了检校的高精度性、可靠性与可行性。

1 数码相机的误差来源
数码相机是利用CCD( Charge Coupled Device)将入射相机镜头的光辐射能量转化为数字影像的,CCD传感器感光元的数量为衡量数码相机性能的重要指标[1]。数码相机的误差不仅可由光学镜头的畸变与机械误差引起,还可能由视频信号的A/D转换产生,分别称为光学畸变差、机械误差和电学误差。光学畸变是影响像点坐标质量的一项重要误差,主要是由相机物镜系统设计、制作和装配所引起的像点偏离其理想位置的点位误差,光学畸变可分为径向畸变差和偏心畸变差两类;机械误差是在光学镜头获取的影像转化到数字化阵列影像这一步产生的误差,主要由以下两个因素引起:一是扫描阵列不平行于光学影像,致使数字化影像相对于光学影像有旋转;二是每个阵列元素尺寸不同而产生不均匀变形。电学误差主要包括行同步误差、场同步误差及数据格式转换时的采样误差。
2 当前主流检校方法的比较
当前主要的检校方法大体上分两类:一类是直接线性变换解法,但它因无需内方位元素值和外方元素的初始近似值,故仅适用于非量测相机所摄影像的摄影测量处理;另一类是一种基于空间后方交会的检校方法,它以共线方程为基础,以像点坐标作为观测值,解求相机内外方位元素、畸变系数以及其他附加参数的检校方法。这种方法正好适合解决数码相机所遇到的问题,因而本文利用此方法来检校,并且已经在生产实践中产生了不错的结果。
3 数码相机的检校
当前使用的主流相机是非量测相机,存在光学畸变和电的、机械的等误差。因而对数码相机的检校内容包括①主点(x,y)的位置测定;②主距(f)测定;③光学畸变系数测定。
3.1 检校的目的及数学模型
数字相机检校的目的是恢复影像光束的正确形状,即通过检校获取影像的内方位元素和各项畸变系数。前面已经提到本检校是基于一种空间后方交会的检校方法[3]。它是以共线方程作为基础,以像点坐标作为观测值,解求相机内外方位元素、畸变系数以及其他附加参数的一种检校方法。共线方程式为
其中,(x,y)为像点的像平面坐标;f为影像的内方位元素;(X,Y,Z)为物方点的空间坐标;a,b,c(i=1,2,3)为影像的3个外方位角元素组成的9个方向余弦;X表示影像的外方位元素;X表示影像的内方位元素;X表示一些附加的参数,主要是光学畸变改正项。
3.2 检校场的改造
3.2.1 原有检校场
对检校场的要求:
(1)相机在“无穷远”处能获得满像幅的检校场图像;(2)检校场要有一定的层次来布设标志点;(3)相机可在不同摄站位置进行拍摄。
本次检测对象为佳能5D系列数字相机,其分辨率为5616×3744,标称焦距为35mm,影像以RAW格式存储输出[4]。使用室外检校场是在某楼正立面布设了近千个间隔为1.0~2.5m的控制点标志;该楼高约30m,宽约为100m,墙体有电梯、走廊和凹槽,构成了前后四个层次的立体结构。拍摄点为距离检校场大40m以外,与焦距相比,可视为无穷远处,获取的影像能充满像幅。
3.2.2 控制点标志及空间定位数据的获取
对于控制场标志点的选取最初制定了多套方案,包括材料、形状等,为了提高控制点坐标的获取效率和长期使用的目的,经过多次反复的测试控制点标志由黑色的铝片做成,并且创性地在铝片中间粘贴了全站仪棱镜反光片[5]。此检校场是在成熟的原检校场的基础上通过扩展、加密布设后形成的。在控制点外业测量中用全站仪使用全圆测回法(半测回)进行测量,之后内业进行数据处理计算得到每个点位的精确坐标。

3.3 参数可靠性验证
基于像点系统误差改正模型和像主点坐标,用VC++6.0编写了相应程序,对所拍摄像片进行畸变差改正,并进行重采样;随后检校软件对重采样后相片经重新求取各系统误差参数与内方位元素,通过解算软件查看相片畸变差,影像最大畸变小于1微米(一个像元为9微米×9 微米),已在限值范围内。
4 结束语
通过上述分析可以得到以下几点结论:
第一,对于大面阵数码相机,基于室外控制场的检校具有精度高并且可靠的特点;
第二,在建立检校场时,控制标志点应该尽量均匀分布,并且需在3个坐标方向上有一定的延伸,以免造成线性方程的强相关;
第三,对于航空用数码相机,像点很小的误差都会给物方点位精度带来比较大的影响;
第四,航空数码相机检校存在主距的锁定与相机固定问题,在相机检校之前需考虑如何将其机械固定又不影响相机的操作。大型室外航空摄影数码相机检校场的创新设计建设,再加上高精度的相机检校方法,只要按照既定操作步骤即使非专业人士也能够得出高精度的相机检校数据。这对今后航空摄影数码相机的应用范围扩展了空间,只要是能满足一定条件的高档普通摄影数码相机完全可以达到摄影测量的高精度、大视场角要求,从而加速了航空摄影测量的更进一步发展。
文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:

ADS系列数字航摄仪应用的是推扫式摄影方式,应用POS系统进行数字影像获取。在航空摄影测量中应用ADS系列数字航摄仪,可以不经过扫描便可以直接为遥感图像处理系统及数字摄影测量提供全色...

金秋十月,华夏中原,中国测绘学会主办的中国测绘地理信息科学技术年会10月16日-17日在...

与传统的测绘技术相比,高空摄影技术可以对高空大比例尺的地形图进行较为准确的测绘。...

航空摄影测量技术中的空中三角测量,是在立体摄影测量实践中参照少部分野外控制点,并...

作为一种通过空间数据得到核心技术处理的综合技术,技术应用过程中需要从技术层面分析...
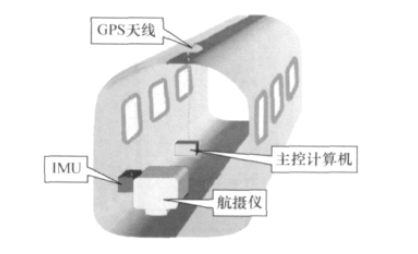
POS辅助空中三角测量的第一步是要采用载波相位动态GPS定位技术测定摄站的空间位置(简...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English