20世纪90年代,GNSS辅助空中三角测量的方法得到了广泛应用,利用GPS获得的定位信息用来辅助空中三角测量,展现了导航技术在测绘领域的应用前景。GPS技术虽然解决了像片的定位问题,但是无法获取像片的姿态参数,不能彻底摆脱地面控制。随着航空摄影测量技术和惯性导航技术的发展,一种新的方法开始应用于航空摄影测量——定位定向系统(Position and Orientation System,简称POS系统)辅助航空摄影。机载POS系统集GPS技术与惯性导航技术于一体,使准确地获取航摄相机曝光时刻的外方位元素(GPS测量得到位置参数,惯性导航系统得到姿态参数)成为可能,从而实现了无(或少量)地面控制点,甚至无需空中三角测量加密工序,即可直接定向测图,从而大大缩短航空摄影作业周期、提高生产效率、降低成本。
因此,POS系统的出现,将从根本上改变传统航空摄影的方法,进而引起航空摄影理论与技术的重大飞跃。随着计算机技术的发展及其惯性、GPS器件精度水平的提高,POS无论定位定向精度还是实时数据处理能力都会有质的提高,将会在航空摄影测绘方面发挥越来越重要的作用。POS系统高精度定位定向技术是POS系统应用的关键技术,它的研究可以极大的推动POS系统的发展。
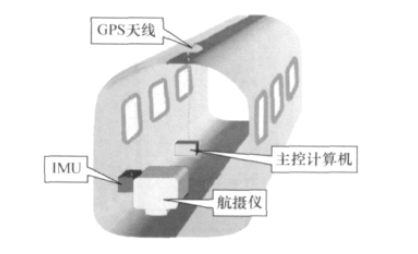
1、 POS系统结构组成
POS系统本质上集惯性导航技术与 DGPS(Differential GPS,差分GPS)技术一体,主要硬件组成部分包括惯性导航系统、DGPS与POS系统计算机系统,POS还包含一套事后处理软件用于融合数据事后处理。
其中DGPS通过用户与基站GPS接收机提供实时差分GPS定位信息,惯性导航系统提供载体实时角速度与加速度信息,通过POS计算机系统实时信息融合得到载体位置、速度、姿态等导航信息,同时POS系统采集惯性导航系统与DGPS的数据信息利用POS系统事后处理软件得到载体位置、速度、姿态等导航信息。下面对其中最重要的惯性导航系统和卫星导航系统进行研究,最后对其POS计算机和事后处理软件进行简单介绍。
1.1 惯性导航系统
惯性导航技术是以牛顿力学定律为基础,利用一组加速度计测量载体的加速度,利用一组陀螺仪测量载体的角运动,经过积分运算求解载体位置、速度和姿态信息的技术。根据惯性导航原理在物理平台中的实现,称为惯性导航系统,依据有无实际物理平台可分为平台式惯性导航系统和捷联式惯性导航系统。与平台式惯导系统相比,捷联式惯性导航系统以数学平台代替了惯性物理平台,因而结构简单,平台,体积、重量和成本大大降低,因此目前已经在各类导航设备中广泛应用。
捷联惯性导航系统和平台惯性导航系统的区别在于捷联惯导系统利用陀螺仪的输出实时计算姿态转移矩阵(即“数学平台”)和姿态角,其他的解算则与平台惯性导航系统一致。捷联惯性导航系统中,陀螺仪和加速度计的组合体通常称为惯性组件(Inertial Measurement Unit,IMU),IMU对系统而言是开环的,仅仅起到了惯性传感器信号输入的作用,并没有对IMU进行反馈控制,所有的信号处理在计算机内实现,因此实现方便。
捷联惯性导航系统的核心是导航计算机实现的惯性平台,即“数学平台”。数学平台是用陀螺测量的载体角速度进行姿态矩阵解算,从姿态矩阵中可以得到实时姿态角信息,并用姿态矩阵将加速度计输出从机体坐标系变换到导航坐标系,然后进行导航解算。
目前捷联惯性导航系统发展比较成熟,尤其是高精度激光、光纤陀螺的出现与逐步成熟,促使捷联惯性导航系统越来越成为航空载体的主流配置,POS系统采用捷联惯性导航系统,便于与航摄相机集成安装,也便于内部器件的维护与更新。但是,惯性导航系统受工作原理所限,导航参数误差随时间发散,长期稳定性较差,故需要其他导航系统对其进行校正,卫星导航系统因其高精度与稳定性好成为POS系统的首选。
1.2 卫星导航系统
卫星导航系统,由空间导航卫星部分、地面监控部分和用户接收机三部分组成。它具有全天候、高精度、自动化、高效益、性能好、应用广等显著特点,能够实时地提供三维的位置、速度和GPS时间等信息。
GPS定位的基本原理是以GPS卫星和用户GPS接收机天线之间的空间距离作为观测量,根据已知的GPS卫星空间坐标,可以确定用户GPS接收机天线的空间位置。GPS定位方法的实质是以星地空间距离为半径的三球交汇,因此,在一个测站上,需要3个卫星到接收机天线的距离观测量。
GPS导航与无线电导航类似,采用单程测距原理,卫星钟和接收机钟无法保持严格的同步,所以GPS实际的观测量并不是用户接收机天线至卫星之间的真实距离,而是含有卫星钟和接收机钟同步误差的距离,因此又称为伪距。当然,卫星钟差是可以通过卫星导航电文中所提供的相应钟差参数加以修正的,而接收机的钟差,准确测定非常困难,所以,必须将接收机的钟差作为一个未知量与用户三维位置在数据处理中一并解出。因此,在一个观测点上,为了实时求解4个未知参数(3 维空间坐标及一个GPS接收机钟差),至少需要同步观测4颗卫星。
1.3 POS计算机与事后处理软件
在POS系统中,POS计算机系统(POS computer system,PCS)中实时运行以及在事后处理软件中的INS/DGPS组合算法是POS系统的核心部分。POS系统中其他模块如IMU和DGPS都需要以POS计算机系统为硬件平台,通过软件算法来完成;用户对POS系统的操作和控制也需要通过POS计算机系统来完成。
市场上POS产品POS计算机系统的特点与POS应用航空摄影的背景,POS计算机系统有如下特点:
(1)从性能上看,POS计算机系统必须具备强大的计算能力。POS计算机系统需要实时接收并储存IMU和GPS数据、实时对数据进行处理运算,对POS计算机系统提出了较高的要求。
(2)从功能上看,POS计算机系统必须具备强大的导航器件兼容性。目前导航器件无论从精度、性能、数据格式等方面都不一样,导航计算机需要在条件允许的情况下对不同的器件给出不一样的处理方案供用户选择,另外POS计算机系统需要满足系统控制、输出和功能的扩展。
(3)从环境适应性上看,POS计算机系统必须具备良好的抗震性能。POS系统辅助航空摄影,高机动是其环境的主要特点,同时其外形尺寸和功耗也需要严格限制。
事后处理软件顾名思义就是事后离线处理算法软件,对惯性导航系统采集的IMU数据与GPS系统采集的DGPS数据进行事后处理,经过系统解算可获取高精度像片外方位元素。利用航空摄影中应用广泛的Applanix POS/AV 510自带事后处理软件POSPac对事后处理流程进行说明。
2、 航空摄影应用中的POS系统主要误差分析
机载POS系统辅助航空摄影无论从系统器件精度、集成安装或其它机动物理特性等环节都不可避免存在误差,这些误差会影响POS系统的性能,所以必须对其误差进行分析。机载POS系统的误差源主要有:惯性导航系统误差,卫星导航系统误差,时间同步误差。
2.1 惯性导航系统误差
对惯性导航系统误差分析的目的在于,通过分析确定各种误差因素对系统性能的影响,对POS系统采用惯性器件提出精度要求,尤其是陀螺的精度要求;另外一方面,通过对惯性系统误差分析,可以对POS系统的工作情况和器件质量进行评价。惯性导航系统误差根据其误差产生的原因和性质,大体上可以分为以下几类:
2.1.1 IMU仪表误差
IMU仪表误差是指惯性器件陀螺和加速度计的误差,有静态误差和动态误差两个方面。陀螺误差包括由陀螺常值漂移和随机漂移等引起的误差,以及陀螺温度特性引起的误差等;加速度计误差包括随机漂移和温度特性引入的误差等。动态误差主要是指由于载体机动对惯性器件的影响带来的误差。这是惯性导航系统的主要误差源,对于IMU确定性误差需进行补偿,对于随机性误差需要建立合适的误差模型来减小其误差。
2.1.2 初始对准误差
惯性导航系统在进行导航解算前必须进行初始对准,由于输入的初始位置、初始速度不准确引起的初始姿态不准确造成的误差就是初始对准误差。初始对准为后续导航解算给出数学平台基准,所以必须尽量减少初始对准误差。
2.1.3 计算误差与运动干扰误差
计算误差包括数字量化误差、参数设置误差、计算中的舍入误差等。运动干扰误差主要是冲击和震动等造成的误差。这些误差也是影响捷联惯性导航系统精度的重要因素,必须设法消除或削弱。
惯性导航系统误差是POS系统的重要误差源,是POS系统获得高精度姿态方位信息的关键,目前针对具体的误差形式,研究精确的数学模型是减小惯性导航系统误差的主要方法。
2.2 卫星导航系统误差
GPS因为其观察时间短、定位精度高的特点,在测绘领域展现了巨大的应用前景。但是GPS也有许多与生俱来的缺点限制了它的应用,其中GPS误差就是其高精度定位主要影响因素。目前引起GPS误差的因素有很多,主要来源包括以下几部分:
(1)GPS卫星有关的误差,主要有卫星时钟误差、卫星星历误差、SA误差等;
(2)GPS信号传播有关的误差,主要有电离层的附加延迟误差、对流层的附加延时误差和多路径误差等;
(3)接收机设备相关的误差,主要包括观测误差、接收机钟差、天线相位中心误差和载波相位观测的整周不定性影响等。
针对GPS影响较大的误差源具体分析如下所示:
2.2.1 卫星时钟误差
GPS系统是通过测量卫星信号传播时间来测距的,时钟的误差将直接变成测距误差。GPS系统中各卫星钟要求互相同步并与地面站同步,即使采用原子钟计时也不可能绝对稳定,而是存在着漂移。接收机可以通过接收卫星导航电文中钟差参数直接对卫星时钟误差进行改正。
2.2.2 卫星星历误差
GPS卫星星历提供的卫星空间位置与实际位置之差称为星历误差。星历数据由地面监控站注入卫星,而监控站对卫星测量的误差、卫星运动时的摄动因素等都会造成星历中存在误差,其误差一直存在,无法消除。
2.2.3 电离层与对流层折射误差
卫星发射电波到达地面接收机,必须穿过电离层与对流层才能到达GPS接收天线。电磁波在不同介质中得传播特性是不同的,电波电离层与对流层会发生折射,从而产生延时误差。对流层折射误差是指非电离层大气对电磁波的折射。对这种折射误差一般需要建立电离层与对流层模型加以改正,目前GPS接收机中一般都有误差改正模型。
2.2.4 多路径效应误差
多路径效应误差是由于不同的路径到达GPS接收机而产生的误差,主要由接收机周围的地形、地物及各种反射体引起,信号经过多路径传播造成测距误差。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。


ADS系列数字航摄仪应用的是推扫式摄影方式,应用POS系统进行数字影像获取。在航空摄影测量中应用ADS系列数字航摄仪,可以不经过扫描便可以直接为遥感图像处理系统及数字摄影测量提供全色...

金秋十月,华夏中原,中国测绘学会主办的中国测绘地理信息科学技术年会10月16日-17日在...

与传统的测绘技术相比,高空摄影技术可以对高空大比例尺的地形图进行较为准确的测绘。...

航空摄影测量技术中的空中三角测量,是在立体摄影测量实践中参照少部分野外控制点,并...

作为一种通过空间数据得到核心技术处理的综合技术,技术应用过程中需要从技术层面分析...
POS辅助空中三角测量的第一步是要采用载波相位动态GPS定位技术测定摄站的空间位置(简...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English